全國服務咨詢熱線:
15216837090
15216837090

一、引言
光機電氣一體化控制實訓系統,系統由型材導軌式實訓臺;PLC模塊(FX2N-48MT晶體管輸出);變頻器(FR-E740三相輸入功率0.75kW)模塊;電源模塊1個(三相電源總開關帶漏電和短路保護);按鈕模塊(開關電源24V/6A 1只,急停按鈕1只);觸摸屏;模擬生產設備實訓模塊(包含上料機構井式工件庫1件,物料推出機構1件,光電傳感器2只,磁性開關2只,單桿氣缸1只,單控電磁閥1只,警示燈1只;皮帶輸送線(三相交流減速電機AC 380V,輸出轉速130r/min);搬運機械手(單桿氣缸1只、雙桿氣缸1只、氣動手爪1只、電感傳感器1只、磁性開關5只、行程開關2只、步進電機1只、步進驅動器1只、單控電磁閥2只、雙控電磁閥1只);分類倉儲物料有金屬(鋁)4個,尼龍黑、白色各4個);接線端子排、各種傳感器、警示燈和氣動電磁閥等組成;可根據任務書中要求完成程序設計調試及相應的動作要求。
二、摘錄任務書中難點部分要求
設備部件名稱和位置如圖1所示。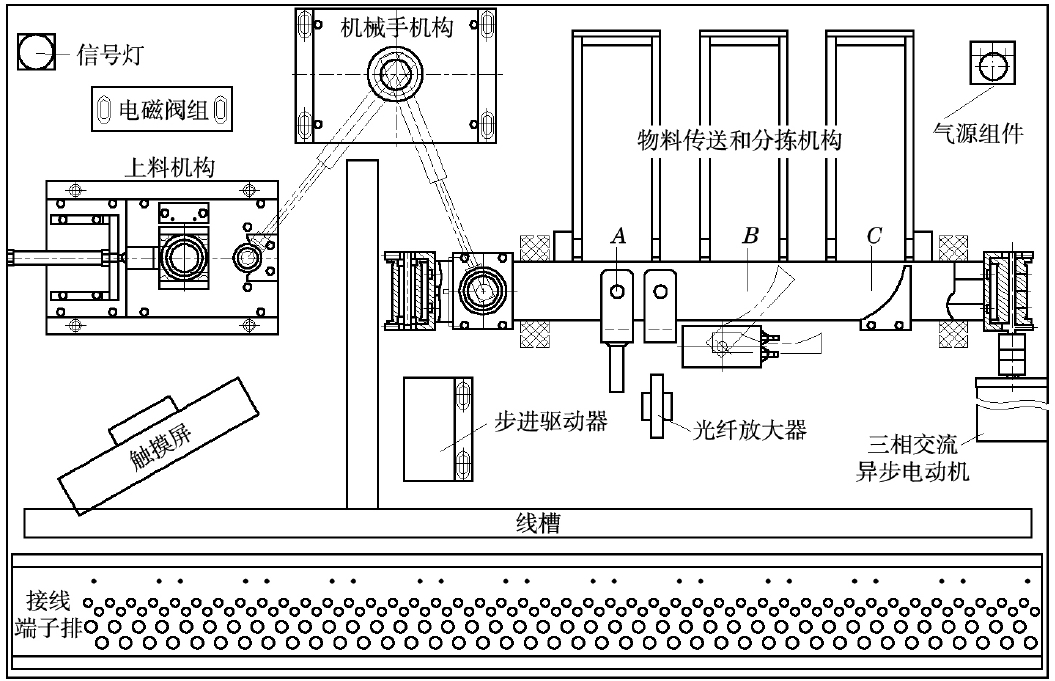
圖1 設備部件名稱和位置
1.動作流程
上料機構推料氣缸將零件(金屬零件、黑色尼龍零件和白色尼龍零件隨機提供)推到存放料臺;機械手將零件從存放料臺搬運至物料傳送機構并經傳送帶入料口到輸送線上,只有當傳送帶上的零件被送入料槽后,機械手才可以從入料口放入下一個零件。上料機構料筒內沒有零件時,黃色信號燈長亮,設備暫停,放入零件后自動啟動。
在輸送線上的零件由相應位置的推料或導料裝置,經出料槽分送到零件組裝機構進行組裝,相應位置的推料或導料裝置將零件送入料槽后回原位。
2.零件分送要求
在位置A對應的出料槽分送到組裝機構的零件必須滿足是由*個是金屬零件,第二個白色尼龍零件,第三個是金屬零件排列成的套件。在位置B對應的出料槽分送到組裝機構的零件必須滿足是由1個白色尼龍零件和2個黑色尼龍零件組合成的套件。同時滿足位置A對應的出料槽和位置B對應的出料槽要求的零件,應優先經位置A對應的出料槽分送到組裝機構。
不滿足組合和排列關系的零件應導入位置C對應的出料槽。皮帶輸送線由位置A向位置C方向送零件時,三相交流異步電動機以35Hz的頻率帶動皮帶輸送機運行;皮帶輸送機由位置C向位置A方向送零件時,三相交流異步電動機以25Hz的頻率帶動皮帶輸送機運行。零件到達推出位置或被導入相應的料槽后,皮帶輸送機停止運行。依據動作流程分配的PLC對應I/O口見表1。
| 序號 | 內容 | 輸入 | 內容 | 輸出 |
| 1 | 急停開關 | X000 | 機械手步進電機啟動(PUL) | Y000 |
| 2 | 運行測試按鈕SB4 | X001 | 機械手步進電機方向(DIR) | Y001 |
| 3 | 送料氣缸推出到位 | X002 | 機械手步進電機使能(ENA) | Y002 |
| 4 | 送料氣缸縮回到位 | X003 | Y003 | |
| 5 | 機械手步進電機原點 | X004 | 綠色信號燈1Hz | Y004 |
| 6 | 機械手步進電機位置檢測 | X005 | 綠色信號燈2Hz | Y005 |
| 7 | 臂伸縮氣缸伸出到位 | X006 | 黃色信號燈常亮 | Y006 |
| 8 | 臂伸縮氣缸縮回到位 | X007 | 送料氣缸推出 | Y007 |
| 9 | 前臂升降氣缸下降到位 | X010 | 臂伸縮氣缸伸出 | Y010 |
| 10 | 前臂升降氣缸縮回到位 | X011 | 前臂升降氣缸下降 | Y011 |
| 11 | 氣動機械手爪夾緊到位 | X012 | 氣動手爪夾緊 | Y012 |
| 12 | 推料氣缸推出到位 | X013 | 氣動手爪放松 | Y013 |
| 13 | 推料氣缸縮回到位 | X014 | 電機正傳(A料槽向C料槽) | Y014 |
| 14 | 旋轉氣缸旋轉到位 | X015 | 電機反傳(C料槽向A料槽) | Y015 |
| 15 | 旋轉氣缸返回到位 | X016 | 異步電機旋轉頻率35Hz | Y016 |
| 16 | 料筒有料檢測 | X017 | 異步電機旋轉頻率35Hz | Y017 |
| 17 | 存放臺有料 | X020 | 推料氣缸推出 | Y020 |
| 18 | 輸送皮帶入料口有料 | X021 | 旋轉氣缸旋轉 | Y021 |
| 19 | 金屬檢測傳感器 | X022 | ||
| 20 | 白色尼龍檢測傳感器 | X023 | ||
| 21 | 分料槽進料檢測傳感器 | X024 | ||
| 22 | 零件組裝工序啟動按鈕SB1 | X025 | ||
| 23 | 啟動組裝工序按鈕SB5 | X026 | ||
| 24 | 停止按鈕SB6 | X027 |
表1 控制電路I/O分配表
3.程序設計思路
根據PLC編程規則對本動作流程采取簡單的順序設計,分析動作要求轉化內容為:上料機構井式存料臺內檢測開關檢測有料,且存放臺無料的情況下,送料氣缸推出;送料氣缸推出到
位檢測開關有信號停頓1s,送料氣缸縮回。存放臺物料到位后,機械手在原點信號到位,前臂升降氣缸縮回信號到位,臂伸縮氣缸縮回到位信號到位,機械手爪松開到位信號到位,臂伸縮氣缸伸出,前臂升降氣缸下降,待到位信號顯示正常,機械手進行抓取,抓取到位信號到位。前臂升降氣缸縮回,臂伸縮氣缸縮回;前臂、伸縮氣缸縮回到位信號到位。步進電機向右旋轉(步進電機旋轉角度依靠步進電機控制驅動器發出的脈沖數進行控制),步進電機旋轉到位信號到位,前臂、伸縮氣缸伸出、下降;檢測輸送皮帶入料口無料,機械手爪松開,前臂、伸縮氣缸縮回到位后,步進電機回歸原點,等待下次循環。
出料槽完成分選,首先要自動識別黑色尼龍、白色尼龍、金屬鋁塊3種物料,金屬鋁塊可用提供的金屬傳感器進行檢測,白色尼龍依靠光纖傳感器進行檢測,黑色尼龍只有靠排除法進行確認,即從皮帶入料槽檢測有料輸送帶開始運行到出料槽B的時間內,檢測不是金屬物料又不是白色物料即為黑色尼龍。這樣就可以依據內部繼電器、計數器、計時器、通過電機的正反轉進行控制,具體思路同上,考慮防止撞機等安全因素,完成上述要求的程序設計,從整體程序內摘錄部分程序(圖2)。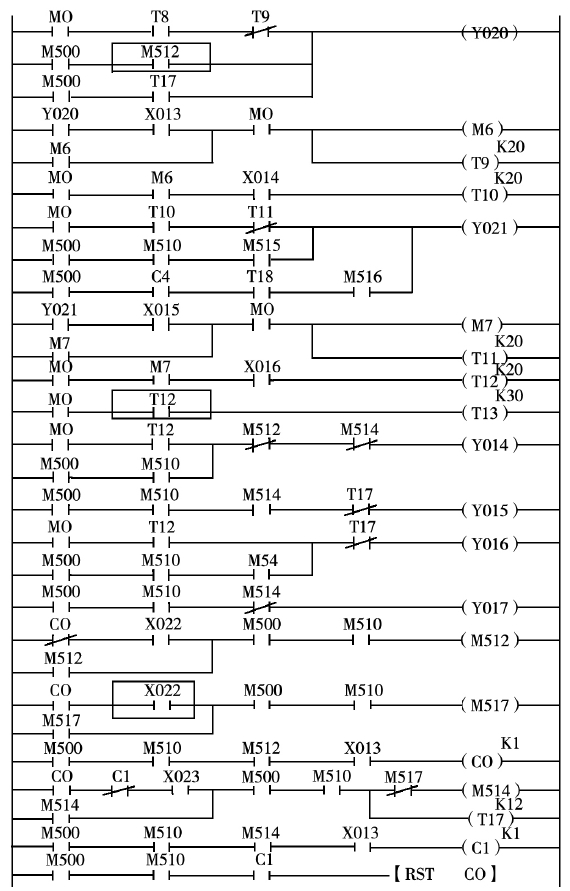
圖2 部分程序
三、結束語
根據實際動作要求,起初編寫的程序存在較多漏洞,經過多次在實驗臺上進行測試,所設計程序*可實現任務書的要求并達到zui終實驗要求。在編程調試程序時,實驗臺中涉及到氣缸控制,在線調試方法的靈活運用,步進電機、光電傳感器、光纖傳感器、光纖放大器、三相異步電機、三菱變頻調速器、三菱PLC主機的應用,代表了自動化設備的生產模式,可推廣至各個領域,特別是自動化生產線,在量產的今天不但可節省用工成本,而且可提高設備利用率,創造更*。
電話
微信掃一掃

 當前位置:
當前位置: