您好!歡迎訪問上海育仰科教設備有限公司網(wǎng)站!
全國服務咨詢熱線:
15216837090
15216837090

虛擬教學是指以虛擬現(xiàn)實技術為工具,對教學過程進行基于計算機的仿真,生成能夠使學習者獲得知識、經(jīng)驗的教學場景。虛擬教學是一種現(xiàn)代化的教學方法,是現(xiàn)實教學的一種延伸。虛擬教學極大解決了現(xiàn)實教學過程中來自時間和空間的限制,使學習過程更加靈活。雖然虛擬教學與實際的“面對面”的教學過程相比還有很大差距,但是它所具有的資源共享、方便的特點很大程度上拓展了教學的時空,解決了教學資源及教師緊張的問題。
虛擬教學所提供的教學場景是具有沉浸感、可交互性、并能啟發(fā)操作者的仿真環(huán)境。在機械制圖課程中引入虛擬教學,可以為學生提供更多的零件模型進行學習,可以使學生對機械產(chǎn)品裝配過程有更深入的了解,從而可以提高學生的圖形理解力,增強其空間想象能力,并激發(fā)工程創(chuàng)造力。因此,從1997 年至今機械制圖的教學人員對該內(nèi)容進行了廣泛的研究,發(fā)表了很多這方面的論文。本文是在閱讀這些文獻的基礎上進行的,第1 節(jié)指出機械制圖虛擬教學的主要研究內(nèi)容及虛擬教學系統(tǒng)的研究進展;第2 節(jié)總結虛擬教學環(huán)境的研究進展;第3 節(jié)討論機械制圖課程中虛擬教學的關鍵技術;第4 節(jié)對進一步加強虛擬教學提出建議。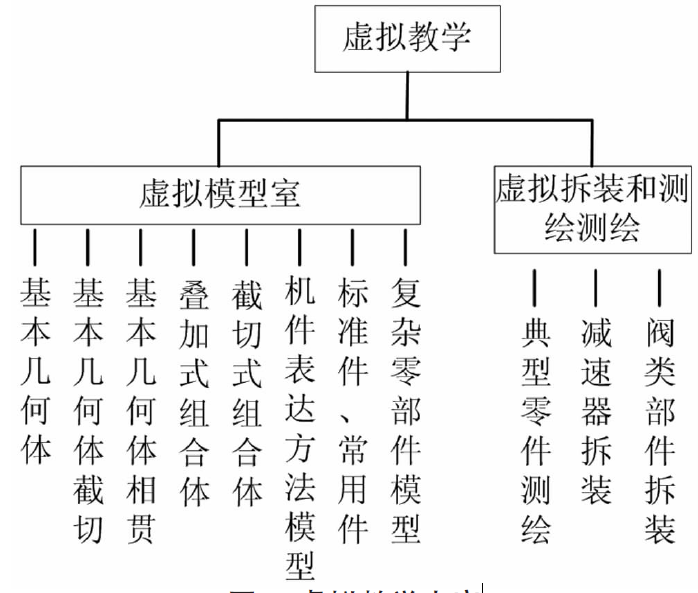
圖1 虛擬教學內(nèi)容
一、虛擬教學體系及主要研究內(nèi)容
機械制圖課程中的虛擬教學主要包括虛擬模型室、虛擬拆裝和測繪的研究,如圖1 所示。
虛擬模型室的建立主要作用是進行模型展示。通過大量的模型展示,開闊學生眼界,提高機械產(chǎn)品認知能力。其次,對照投影反復觀看模型,可以幫助他們更好地理解“空間———平面、平面———空間”的對應統(tǒng)一關系,完善其對三面投影的認識,幫助建立空間想象能力。再者,可以加強構型方法的學習。在體驗式教學中,使用參數(shù)化建模的方法,通過修改基本幾何體尺寸讓學生更好地理解了相貫的概念,以及相貫線的變化趨勢。]通過建立大量的三維虛擬模型,引導學生進行仔細觀察、分析,使得難以想象的空間形體抽象概念易于接受。虛擬模型室的實現(xiàn)需要進行零件的造型設計、系統(tǒng)環(huán)境設計、以及模型的管理。
虛擬拆裝和檢測技術主要應用在零件圖和裝配圖學習過程中。對減速器的工作原理進行了動畫演示、說明,并提供了可以對減速器進行虛擬拆裝的虛擬教學環(huán)境。學生可以在計算機上反復進行減速器的拆裝,從而對減速器的機械結構,零部件之間的相互連接、轉動的傳遞,正確的拆裝方法都有了非常深入的了解。
研究開發(fā)了可以進行虛擬測繪的場景。包括扳手、鉗等拆裝工具的使用,游標卡尺、螺紋尺等測繪工具的使用,和測繪過程的學習。實現(xiàn)這樣的虛擬教學系統(tǒng)除了要進行模型的處理,還涉及到虛擬裝配的關鍵技術,如碰撞、約束等內(nèi)容。
通過分析,并結合虛擬現(xiàn)實技術的發(fā)展現(xiàn)狀,筆者給出一個虛擬教學系統(tǒng)體系結構,如圖2 所示。交互層包括可以進行人機交互的硬件設備,并為虛擬教學環(huán)境的實現(xiàn)提供了基礎。功能層包括所實現(xiàn)的功能,而層和數(shù)據(jù)層為這些功能的實現(xiàn)提供。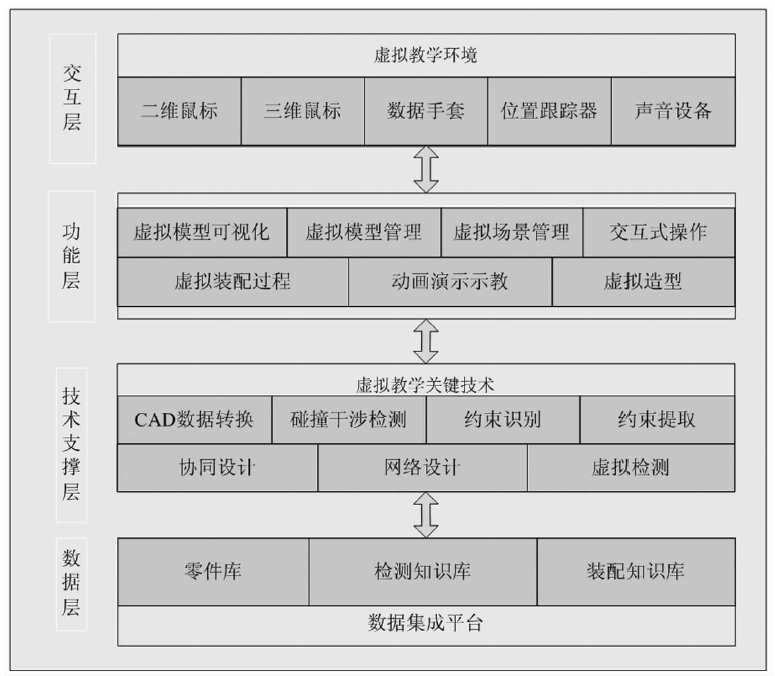
圖2 虛擬教學系統(tǒng)體系結構圖
下面本文將對系統(tǒng)的核心內(nèi)容虛擬教學環(huán)境研究、虛擬教學的關鍵技術研究進行重點說明。
二、虛擬教學環(huán)境的研究
根據(jù)虛擬現(xiàn)實系統(tǒng)所使用的虛擬設備和產(chǎn)生的沉浸感的不同,虛擬現(xiàn)實系統(tǒng)可以分為CAVE 式虛擬系統(tǒng)、頭盔式虛擬系統(tǒng)和桌面式虛擬系統(tǒng)。在機械制圖課程的虛擬教學中,所采用的虛擬現(xiàn)實系統(tǒng)均為桌面式系統(tǒng),如圖3所示。這是因為機械制圖課程虛擬教學的主要目的是提高學生的圖形理解力,通過虛擬教學系統(tǒng)加強學生對零件測繪和機器部件裝配知識的了解。過多的虛擬硬件設備不僅增加了虛擬教學系統(tǒng)的成本,也會迫使學生花大量時間熟悉硬件使用,而忽略系統(tǒng)本身的作用。
虛擬教學環(huán)境的構建主要是基于各種虛擬平臺進行如VIrtools、VRML、Cult3D 等。這些虛擬平臺可以實現(xiàn)在網(wǎng)頁上建立交互的三維對象,通過鼠標、鍵盤對三維對象進行旋轉、縮放,同時也提供了事件、動作等屬性,以及基于JAVA 的開發(fā)接口,使得用戶可以完成更復雜的控制。基于VRML 的虛擬教學的實現(xiàn)流程,如圖4 所示。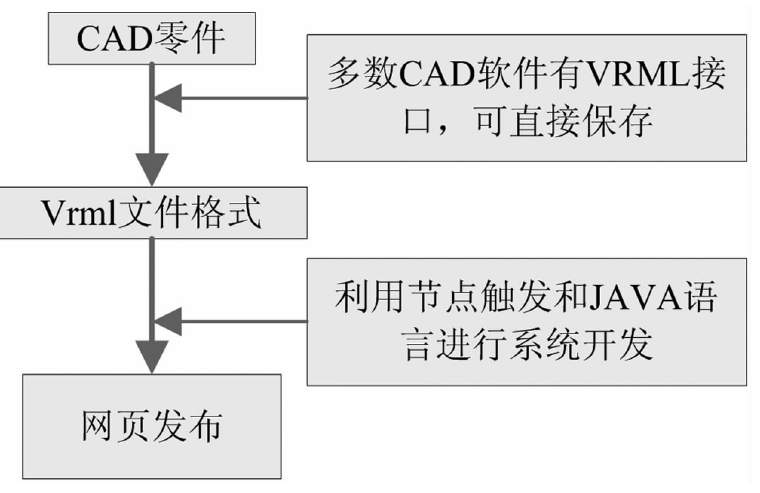
圖4 基于VRML 的開發(fā)流程
除了上述幾種軟件,也有習慣于C 語言的用戶基于底層OpenGL 進行虛擬教學系統(tǒng)的開發(fā)。
三、關鍵技術的研究
作為新興的研究內(nèi)容,虛擬教學的發(fā)展與計算機技術、人工智能技術等多個學科緊密相關,涉及的關鍵技術包括仿真與可視化研究、CAD 模型的格式轉換、虛擬系統(tǒng)中零件的定位與約束、虛擬檢測、協(xié)同設計、人機交互等多個方面。
根據(jù)對虛擬教學的影響程度,下面對幾個重要的關鍵技術分別來進行論述。
(一)虛擬模型及格式轉換
虛擬模型是虛擬教學的基礎,而機械制圖課程更是不能缺少立體模型的輔助。模型的好壞對終的教學系統(tǒng)影響巨大。目前大部分虛擬現(xiàn)實軟件都沒有強大的建模功能,因此仍然需要從CAD 軟件進行造型,然后再通過數(shù)據(jù)格式轉換,生成虛擬系統(tǒng)可以接受的文件格式,再進行虛擬操作。
機械制圖虛擬教學中常用的CAD 軟件有Pro/E、Solidworks、Inventor、UG 等。在進行格式轉換時,有些軟件可以與相對應的虛擬現(xiàn)實進行對接,如Pro/E 與Division Mockup虛擬現(xiàn)實系統(tǒng),由于屬于同一公司開發(fā),因此可以直接進行格式轉換;但是大多數(shù)軟件則需要開發(fā)專門的轉換接口或者以標準化數(shù)據(jù)格式為中間文件進行格式上的轉換,如圖5 所示。
目前的虛擬教學研究,主要采用的是以標準化數(shù)據(jù)接圖3 桌面式虛擬系統(tǒng) 口為中間文件進行數(shù)據(jù)格式的轉換。相對于接口,該方法易于實現(xiàn)。
(二)虛擬環(huán)境中的約束與定位
在虛擬環(huán)境中進行零件的測繪或者裝配操作,必須要進行零件的定位,而虛擬現(xiàn)實環(huán)境本身缺乏現(xiàn)實環(huán)境中存在的各種物理約束和感知能力,因此需要依靠自定義方式進行定位。目前比較通用的定位模式是基于約束的定位,包括基于幾何位置約束的定位、基于碰撞的約束定位,以及基于裝配語義約束的定位。
基于幾何位置約束是指通過定義零部件的幾何坐標位置進行裝配,這種情況下會出現(xiàn)零部件的刺穿情況。而如果使用基于碰撞的約束,為零件設置合適的包圍盒,通過碰撞檢測算法對于可能碰撞的地方進行計算,則可以提高系統(tǒng)的擬實性,這也是目前多數(shù)虛擬系統(tǒng)所用的定位方法。
(三)虛擬測繪
零件測繪是機械制圖課程的重要內(nèi)容。因此虛擬測繪也是虛擬教學的研究內(nèi)容之一。由于缺乏力反饋等虛擬硬件設備的支持,現(xiàn)在的虛擬測繪多數(shù)是對于選定點之間的坐標計算,即首先確定需要測量的兩個點,之后計算兩點之間的坐標差。該方法的本質是點到點之間的距離測量,因此選取精度會直接影響測繪結果。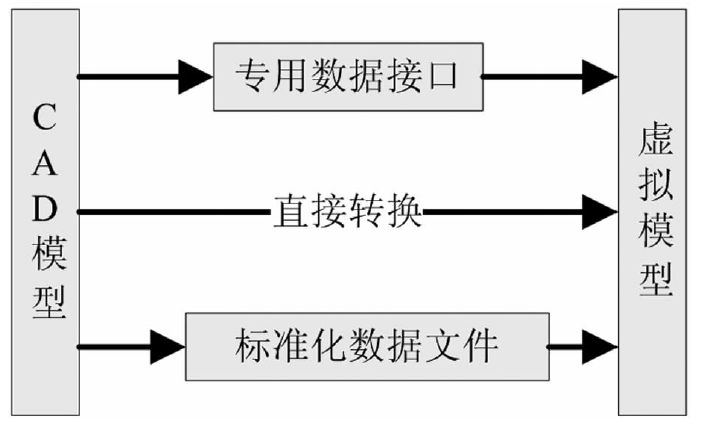
圖5 數(shù)據(jù)轉換
四、結束語
虛擬現(xiàn)實作為一種先進的輔助教學手段,提高了學生的學習積極性和圖形理解力。近年來關于機械制圖的虛擬教學活動的研究,也取得了很大進展。但如何提高系統(tǒng)的交互性,體現(xiàn)以學生為中心,增強學生在虛擬場景中的主觀性,促進創(chuàng)新能力和精神的培養(yǎng),鼓勵學生進行協(xié)同操作,以及建立合理的虛擬教學評價機制仍需要進一步研究。

電話
微信掃一掃
 當前位置:
當前位置: