全國服務咨詢熱線:
15216837090
15216837090

機械的基礎知識
1.機械的概念
機械是機構和機器的總稱。我們在實際工程的領域中,常把具體的機械叫機器或機構,把機器中的機械運動系統叫機構。從功能變換的觀點看,機構與機械有很大的區別。機器指用來根據某種使用要求而設計的一種執行機械運動的裝置,而機構都是用來傳遞與變換運動和力的可動裝置。
機械是用來傳遞運動或動力的能完成有用機械功的裝置,用來變換或傳遞能量、物料與信息。其特點如下:
1)機械首先必須是執行機械運動的裝置。
2)機械必須進行物料或信息的變換與傳遞,并完成有用的機械功。
3)機械中必須要完成能量的轉換。
執行機械運動的裝置是機械的主體,該部分是創新設計的重點內容。其運動方案部分相當于機械原理中的機構運動系統簡圖的設計。是否完成有用的機械功是辨別能否成為機械的關鍵條件。從機械學的角度看,電視機、計算機不是機械,這是因為它們的內部結構不是執行機械運動的裝置,也沒有克服外力作機械功。而剝線鉗、手搖鉆、門窗啟閉的桿件系統等裝置,因沒有能量的轉換,一般稱之為機構,由于機構也是執行機械運動的裝置,故納入機械的概念中。根據機械的特點,還可把機械分為動力機、工作機和信息機。
動力機:一般也叫原動機,是一種把其它形式的能量轉化為機械能的機械。按原動機轉換能量的方式可分為三大類。
*類有三相交流異步電動機、單向交流異步電動機、直流電動機、步進電動機等,它們都是把能量轉化為機械能的機器。
第二類有柴油機、汽油機、蒸汽機、燃汽機輪、原子能發動機等,它們都是通過燃煤、油、鈾獲得熱能再轉化為機械的機器。
第三類有水輪機、風力機、潮汐發動機、地熱發動機、太陽能發動機等,它們都是把自然力轉化為機械能的機器。
根據原動機輸出的數學性質,還可以把原動機劃分為線性原動機和非線性原動機。
當原動機輸出的位移(或轉角)函數為時間的線性函數時,稱為線性原動機。如交、直流電動機是線性原動機。
當原動機輸出的位移(或轉角)函數為時間的非線性函數時,稱為非線性原動機。如步進電機、伺服電機是非線性原動機。非線性原動機包括控制系統,也可作為線性原動機使用,其zui大特點可具有可控性。
彈簧力、重力、電磁力、記憶合金的熱變形力都可以提供驅動力,但已不屬于原動機的范疇。
工作機:工作機是指利用原動機提供的動力實現物料或信息的傳遞,克服外載荷而作有用機械功的機械。大部分機械都是工作機,工作機中必須包含原動機。否則,只能稱為機械裝置。汽車、起重運輸等機械通過搬運物料而作機械功,各類金屬加工機床也是通過物料的傳遞或轉移而作機械功。原動機的種類有限,而工作機的種類卻是多種多樣。由于工作機是完成各種復雜動作的機械,它不僅有運動精度的要求,也有強度、剛度、安全性、可靠性的要求。
信息機:信息機也是一種工作機,只不過是通過各種復雜的信息來控制機械運動。如打印機是通過計算機的指令來控制打印工作的,繪圖機、復印機、傳真機、收音機都是信息機。
2. 機械的組成
掌握機械的組成我們可以參照圖2-1所示的機械組成的示意圖。
圖2-1 機械組成的示意圖
如上圖所示,機械一般由原動機、機械運動系統、控制系統和輔助系統組成。機械運動系統可以是單一的工作執行機構,也可以是由機械傳動機構和工作執行機構的組合。控制系統可以是手柄、按鈕式的簡單裝置或電路,也可以是集微機、傳感器、各類電子元件為一體的強、弱電相結合的自動化控制系統。
控制系統可以是原動機直接進行控制,也可以通過控制元件對傳動機構或工作機構進行控制。
a) b) c)
圖 2-2 無轉動機構的機械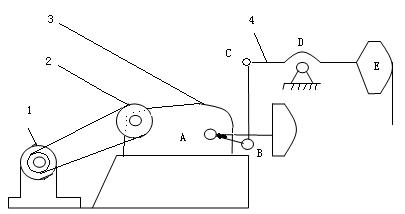
圖2-3 油田抽油機機構簡圖
1—電動機 2—帶傳動 3—減速箱4—ABCDE 為連桿機構
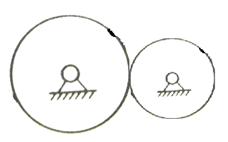
工程中,有些機械沒有傳動機構,而是由原動機直接驅動執行機構。如水利發電機組、電風扇、鼓風機以及一些用直流電動機驅動的機械,都是沒有傳動機構。隨著電機調速技術的發展,無傳動機構的機械有增加的趨勢。圖2-2所示為機械中沒有傳動機構。
圖2-2a為水力發電機,圖2-2b為鼓風機,圖2-2c為二坐標機床的工作臺。
具有傳動機構的機械占大多數。圖2-3所示的油田抽油機就是具有代表性的機械。
圖2-3中,帶傳動與齒輪減速箱為傳動機構,起緩沖、過載保護、減速的作用。連桿機構ABCDE為執行機構,圓弧狀驢頭通過繩索帶動抽油桿往復運動。
3. 機械運動系統
機械運動系統主要指機械中的傳動機構和工作執行機構,從機構學的角度看問題,二者是相同的,只不過在機械中所起的作用不同。有些機械中有時很難分清傳動機構和執行機構,故二者統稱為機械運動系統。機械運動系統可以是機構的基本型,也可以是機構的基本型的機構組合或組合機構。
1) 機構的基本型
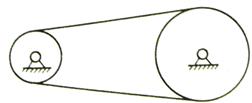
機構的基本型是指zui基本的、zui常用的機構型式。目前,zui常見的機構有連桿機構(圖2-4a)、凸輪機構(圖2-4b)、齒輪機構(圖2-4c)、帶傳動機構(圖2-4d)、蝸桿傳動機構(圖2-4e)等,由于基本型的確定原則尚無確切說明,這里就不再對這些常見機構進行劃分了。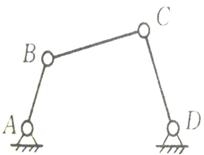

a) b) c)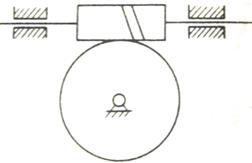
d) e)
圖2-4 常見機構類型
2) 機構的組合
形象的來說,機構就是一部機器的骨骼圖,在實際應用中,單一的機構經常不能滿足不同工作的需要。把一些基本機構通過適當的方式連接起來,從而組成一個機構系統,稱為機構的組合。在機構的組合系統中,各基本機構都保持原來的結構和運動特性,都有自己的獨立性。在機械運動系統中,機構的組合系統應用很廣泛。
例如,圖2-5所示的鐵板運輸機中,定軸齒輪1把運動傳遞給齒輪2,定軸齒輪1上的曲柄通過連桿機構ABCD把運動傳遞給系桿H。齒輪2、3、4與系桿H構成一個差動輪系,該輪系的兩個輸入均為主動輪1提供,zui后由齒輪3輸出。可見,該系統中的連桿機構和差動輪系機構都沒有因為互相連接而影響自己的機構特性。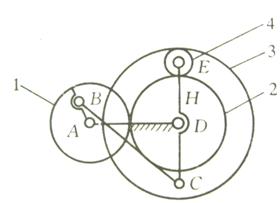
圖2-5
我們創新設計機構時,要把握機構組合系統中的各機構均保持其原來的特性的原則,應該對機構組合系統中的各個機構進行獨立的分析與設計。
3) 組合機構
在分析創新設計類型時,我們知道有一種創新叫組合創新設計。組合機構就包含其中,它是機構創新的重要方法之一。
我們首先應該清楚,組合機構是指若干基本機構通過特殊的組合而形成的一種具有新屬性的機構,可見,它與與機構組合有本質的不同。組合機構中的各基本機構已不能保持各自的獨立性,所以我們就不能用原基本機構的分析和設計方法進行組合機構的設計。每種組合機構都有各自的分析和設計方法。
常見的組合機構有齒輪—連桿組合機構、齒輪—凸輪組合機構、凸輪—連桿組合機構。組合機構常用于完成復雜運動的機械系統中。如圖2-6所示的齒輪連桿組合機構,它就是實現較復雜運動軌跡的機械系統。其中的五桿機構ABCDE的兩個輸入運動是通過齒輪1、2的運動來實現的,適當的選擇機構尺寸與齒輪傳動比,可得到預定的連桿曲線。
圖2-6 齒輪連桿組合機構
4. 機械的控制系統
隨著機械行業的不斷發展控制系統在機械中的作用也越來越突出,我們在進行機械創新設計時也可以將思維轉移到這一領域,用自動化甚至智能化的控制系統來代替傳統的手工操作。
目前機械設備中的控制系統常見的有:機械控制、電氣控制、液壓控制、氣動控制及綜合控制。其中以電氣控制的應用,與其它控制形式相比有很多優點。
電氣控制系統的特點是:體積小,操作方便,無污染,安全可靠,可進行遠距離控制。其原理和方法是:通過不同的傳感器可把位移、速度、加速度、溫度、壓力、色彩、氣味、等物理量的變化轉變為電量的變化,然后由控制系統進行處理。
由于計算機技術和自動控制技術的發展,現代機械的控制系統更加先進、復雜,可靠性也大大增加,可對運動時間、運動方向與位置、速度等參數進行準確的控制。
總之,現代的機械控制系統集計算機、傳感器、接口電路、電器元件、光電元件、電磁元件等硬件環境及軟件環境為一體,而且正向自動化、精密化、智能化、高速化的方向發展,其安全性、可靠性的程度不斷提高。在機電一體化機械中,機械的控制系統將起更加重要的作用,我們應該重視在這一領域的創新設計。
2.5.2 機械系統及其發展
1. 機械系統的基本組成形式
根據原動機、傳動機構、執行機構的不同組合以及機械系統運動輸出特性
的不同,機械系統的基本組成形式見表2-1所示。
表2-1中的線性機構是指機構傳動函數為線性函數的機構。如齒輪機構、螺旋傳動機構、帶傳動機構及鏈傳動機構等都是線性機構。而機構傳動函數為非線性函數的機構,則稱為非線性機構。如凸輪機構、連桿機構、間歇運動機構等則是非線性機構。
類型1和2是zui基本、zui常見的機械系統。如電動卷揚機屬類型1,鄂式破碎機屬類型2。類型5在數控機床、機器人等自動機械中得到了廣泛的應用。其它類型則少見其應用。
表2-1 機械系統的基本組成形式
| 類 型 編 號 | 原動機 | 傳動機構 | 執行機構 | 機械系統的輸出運動 | ||||
| 線性原動機 | 非線性原動機 | 線性機構 | 非線性機構 | 線性機構 | 非線性機構 | 簡單機構 | 復雜機構 | |
| 1 | √ | √ | √ | √ | ||||
| 2 | √ | √ | √ | √ | ||||
| 3 | √ | √ | √ | √ | ||||
| 4 | √ | √ | √ | √ | ||||
| 5 | √ | √ | √ | √ | ||||
| 6 | √ | √ | √ | √ | ||||
| 7 | √ | √ | √ | √ | ||||
| 8 | √ | √ | √ | √ | ||||
電話
微信掃一掃

 當前位置:
當前位置: