全國服務咨詢熱線:
15216837090
15216837090

目前新型工業自動控制系統被劃分為控制級、監控級和管理級三層結構。監控級的硬件以工業控制機(IPC)為主,其軟件采用工業組態軟件,實現完成現場數據采集、實時和歷史數據處理、報警和安全機制、流程控制、動畫顯示、趨勢曲線和報表輸出以及企業監控網絡等功能;PLC作為現代工業控制的三大支柱之一,以其可靠性高,通用性強,使用方便和較強的抗干擾能力等優點廣泛應用于工業生產的各個領域。
1、現狀與存在的問題
PLC的廣泛應用要求培養出更多熟悉其應用的技術人才,為此各個工科院校均開設了PLC相關課程,以加強學生對該技術的熟悉與掌握,實驗環節又是PLC課程教學的重要環節,屬于工程技術類實驗,設備要求高。各學校的PLC實驗課程都是在PLC單機下來運行控制某一個模擬對象,是簡的控制方式;另外即使配備有以科教儀器為模擬對象的PLC實驗也只是比較單一,并且實驗結果也比較呆板。更重要的是不能反映當前新型工業自動控制系統的現狀,不能滿足目前計算機監控系統的要求。
2、PLC計算機監控制系統的設計
根據以上分析及目前各高校實驗室的實際現狀,筆者開發研究了以PC機作為上位監控機,實驗裝置作為被控對象,PLC作為控制級的計算機監控系統。選用PLC(選用三菱FX—ON—MR60一PLC)作為實驗科教儀器對象的控制器(下位機),實施對模擬對象的檢測及控制,完成工業控制層的控制。為使系統有較理想的控制效果及監控性能,選用計算機作為上位監控機,通過計算機和PLC的通信,借助工控組態軟件開發出實時監控軟件,實現實時監督與控制,方便操作、維護與集中管理的多級控制系統。既能豐富實驗課的教學內容,增強實驗課的教學效果,同時使學生能直觀地通過監視界面,看到對象的動作和PLC的工作情況,也擴展了知識面,增加了學生的學習興趣,活躍了實驗課堂的氣氛,使原本很枯燥的學習變得生動起來。圖1為計算機監控系統原理圖。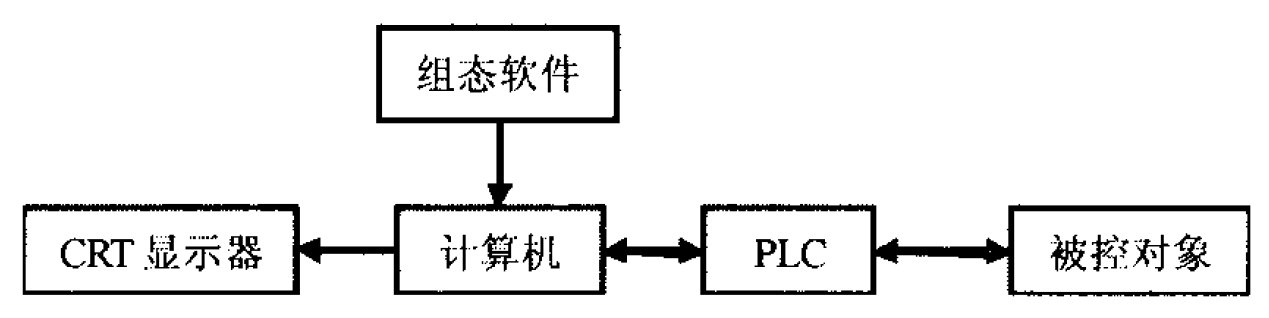
圖1 計算機監控系統原理圖
2.1 系統的組成
開發設計的實驗系統是以三菱FXON-6OMR PLC為控制器,可編程控制器實驗裝置為研究對象完成平時的PLC實驗與開發,及選擇裝有MCGS組態軟件和FXGP—WIN—C的FXON—PLC的編程軟件的計算機一臺。
選擇組態軟件設計友好的人機監控界面,控制PLC實現對科教儀器設備所提供的模擬被控對象的控制,包括模擬電機正反轉、十字路口交通燈控制、八段數碼管顯示、水塔水位
控制、電梯控制、彩燈控制等模擬對象。
被控對象是以科教儀器設備提供的模擬對象,它的數量有限不能*反映常用的PLC應用實例。以PC機作為“仿真模擬對象”,通過組態軟件的開發,對一些工業過程進行組態來仿真真實對象,以擴展PLC實驗的內容。例如自動售貨機,工業機械手的控制等。圖2給出了結合科教儀器設備提供的模擬對象和以Pc機為“控制對象”所開發出的PLC監控實驗系統的界面圖。其中MCGS主要是實時監示各PLC的實際運行情況,并在CRT屏幕上進行動畫顯示,使實驗過程比較逼真。圖2給出了14個實驗過程,監控實驗系統包括了從PLC的基礎練習,到實際工程應用;一部分是直接控制科教儀器設備上的模擬對象,另一部分是在計算機上進行的“仿真模擬對象”。
2.2 PC機和PLC的通信
PLC的通信控制和串行通信接口集中于PLC的通信模塊上。通信模塊中包括通信功能所需要的硬件資源和實現通信的系統程序。PLC通信模塊的作用是在PLC和PC或PLC之間建立數據通信通道。通信模塊的用途有:編程、檢查程序、控制工程方式、監控運行狀態及改變I/O狀態等。PLC網絡通信方式有多種,由于串行通信不需要專門的通信模塊就可以實現一種簡單的通信連接,設計中采用串行通信,使一臺PLC和一臺主機相連,主機除負責監控PLC的運行狀態外,還可以直接發布命令控制PLC的工作,PLC負責現場控制級的自動控制。
在系統中,首先把PLC和計算機相連,按照RS一232的通訊協議設定好。在其軟件的編程環境下編寫下位機的控制程序,再將其寫入PLC中。然后把MCGS中的軟按鈕和PLC設定的開關一一對應,從而實現計算機對PLC控制,并使其按編寫的PLC程序控制模擬對象。
2.3 控制層設計
結合FXON一60MR PLC和PLC—I型可編程控制器實驗裝置,對每個實驗對象按照要求進行設計,合理分配PLC的各I/O端口,并和模擬對象正確接線,使其外部接線按照各輸入/輸出點及科教儀器的對應接線孔和PLC的硬件接線要求進行連線。并且在FXGP—WIN— C的FXON—PLC的編程軟件下進行編程,畫出其梯形流程圖,并經計算機對PLC在線編程。采用計算機完成的“仿真模擬對象”只按工作時序邏輯要求進行在線編程,不用連接線路。
3、設計實例
下面以PLC控制交通信號燈為例,說明以計算機為上位機,借助組態軟件開發應用軟件,負責PC機和PLC間的通信,實現監督管理的計算機控制系統,達到監控PLC設備與工業過程自動控制的目的。
3.1 系統功能
PLC實現十字路口交通燈的控制系統,其功能通過設計好的人機控制界面,實現PLC各個輸入輸出的狀態,并在交通管制時通過在計算機控制界面上的按鈕實現特殊情況下,道路交通燈的控制要求。系統的構成由應用軟件和PLC硬件組成,其中MCGS開發的應用軟件主要是實時監控十字路口交通燈的運行情況;在交通燈發生故障時報警顯示;可通過在界面上
直接控制交通燈的正常及特殊情況下的運行。PLC主要實現對交通燈的直接控制。通過I/O端口的合理分配,以及硬件電路的正確接線,對十字路口交通燈進行控制,并通過軟件編程使交通燈按照預先設定的時間運行。
3.2 系統調試及運行
在PXGP_WIN—C軟件的編程環境下,通過指令表的編程模式編寫程序,并設置好PLC與計算機的通訊協議,選擇COM1,波特率設定為9600bps。檢查程序無誤后,把程序寫入PLC,把PLC撥在“,RUN”狀態,觀察PLC的輸入輸出狀態是否滿足設計要求。此過程可借助實驗室中的PLC控制實驗臺。連接好硬件電路,觀察十字路口交通燈顯示是否按設計要
求進行運行。
運行組態軟件及應用程序,打開設備窗口選擇PLC類型及通信方式設置,使用戶窗口中的屬性設置正確,運行通信窗口檢驗PLC和PC機的通信是否成功。再切換到主控窗口,進行系統的聯調,分別在手動下發布相關信息,觀察PLC及交通燈的運行情況,直到實現按命令控制相應交通燈的變化。
依照電氣原理線路圖和科教儀器進行連線,使系統順序通電,按照設計規定的控制流程,使系統依次投入運行。在上位機的控制畫面中監控PLC的工作,可以實時地對PLC進行控制。調試MCGS與PLC之間的通訊及控制,完成系統設計工作,以達到滿意的控制效果。
通過設計PLC的硬件電路和編寫程序軟件,以及設計MCGS主控界面。在主控界面點擊啟動,PLC開始工作,通過運行寫入PLC的程序,觀察PLC的輸出端口,并在PLC實驗臺上觀察模擬的交通燈的顯示。可看出東西紅燈亮30秒,南北綠燈亮25秒,閃2秒,黃燈亮3秒。交替循環,并與MCGS監控主畫面的動畫鏈接顯示一致,符合設計要求。
電話
微信掃一掃

 當前位置:
當前位置: